
Käyttämällä älykästä AIA-navigaatiotekniikkaa, Landroid käyttää ainutlaatuista kykyään leikata myös monimutkaisia nurmikoita ja saavuttaa kaikki vyöhykkeet myös kapeiden käytävien (minimileveys 60 cm) päässä ilman lisäohjainlankoja.
Kuitenkin joissain tapauksissa sinun on ehkä nimettävä erityisiä vyöhykkeitä ja määritettävä erityiset leikkuuajat jokaiselle vyöhykkeelle.
Miten määrittää leikkuuajat jokaiselle vyöhykkeelle
Nurmikon tarpeiden mukaan voit haluta Landroidin työskentelevän enemmän yhdellä vyöhykkeellä muihin verrattuna.Voit tehdä tämän määrittelemällä kullekkin vyöhykkelle prosenttiosuuden. Muista, että prosenttiosuus viittaa ruohonleikkuusessioiden kokonaismäärään, jotka on ohjelmoitu Landroidille viikossa, ja tämä luonnollisesti riippuu nurmikon koosta.
Mitä tarkoitetaan ruohonleikkuusessiolla?
Se on aikaväli, jonka alussa Landroid poistuu alustasta ja jonka lopussa se palaa sille. Kyseinen aika vaihtelee mallista malliin ja se riippuu akun kapasiteetista ja ulkoreunan pituudesta.
Esimerkiksi:
Oletetaan, että Landroid on asetettu suorittamaan 10 sessiota viikossa (100 %). Jos määrität 70 % vyöhykkeelle 1 ja 30 % vyöhykkeelle 2, yhden viikon kuluessa Landroid suorittaa 7 ruohonleikkuusessiota vyöhykkeellä 1 ja 3 vyöhykkeellä 2.
Muista:
Voit asettaa vähintään 2 ja enintään 4 eri vyöhykettä.
Landroid leikkaa vyöhykkeitä numerojärjestyksessä aloittaen vyöhykkeestä 1.
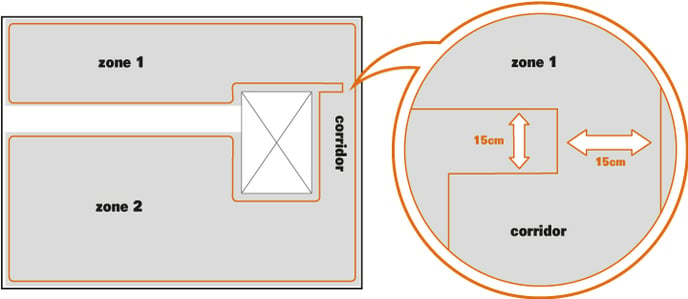
Pullonkaulat
Vyöhykkeet on erotettava pullonkauloilla jättäen noin 15 cm leveä käytävä. Tämän tarkoituksena on estää Landroidia vaeltamasta itsenäisesti yhdeltä vyöhykkeeltä toiselle (koska se on älykäs ja itsenäinen, se helposti tekee sen). Pullonkaulan avulla robotti kykenee seuraamaan rajalankaa ja saavuttamaan jokaisen vyöhykkeen, mutta se ei vahingossa leikkaa ruohoa paikoista, joihin sen ei tule mennä.
Mitä jos nurmikolla on jalankulkuväylä?
Ensimmäiseksi varmista, että jalankulkuväylä on nurmikon tasolla. Jos alueella on portaita tai pudotuksia, terälevy saattaa rikkoutua robotin ylittäessä ne. Jos tilanne on tämä, sinun tulisi luoda sopiva ramppi maaston tasoittamiseksi.
Muista myös, että jos polku on tehty soraa, kiviä tai epätasaisia laattoja tai muuta vastaavaa käyttäen, Landroid saattaa juuttua kiinni.
Jotta Landroid voi saavuttaa jokaisen vyöhykkeen, sinun on tehtävä 15 cm leveä käytävä. Sen on oltava riittävän kapea, jotta robotit eivät siirry vahingossa sen lävitse ruohonleikkuun aikana (sama periaate, joka kuvattiin edellä pullonkaulalle).
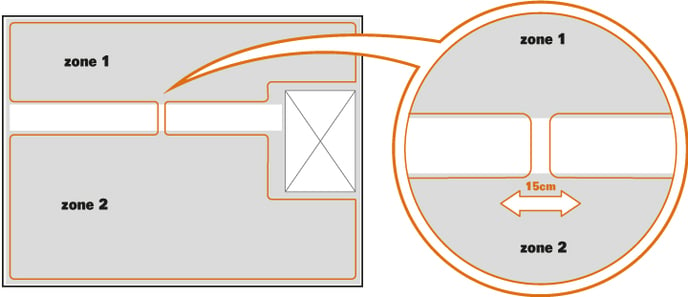
On tärkeää, että rajalankaa ei laiteta polun pinnalle, koska tällöin se saattaa vahingoittua ihmisten tai itse Landroidin toimesta.
Jos sinulla on laatoitettu polku, voit asentaa langan väliin ja peittää sen sitten.
Jos haluat laittaa rajalangan laatoitetun polun tai vastaavan alle, älä hautaa sitä yli 5 cm:n syvyyteen, koska muutoin signaali heikkenee eikä Landroid havaitse sitä.
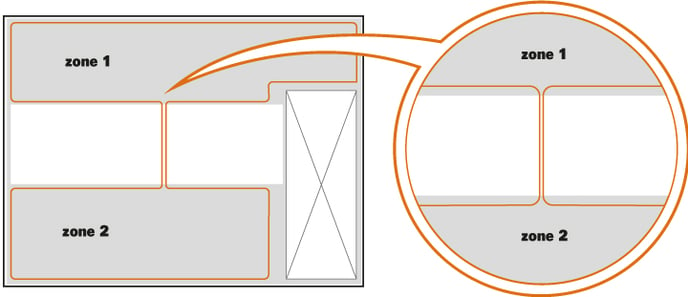
Mitä jos nurmikolla on kaksi tai useampia erillisiä vyöhykkeitä?
Rajalanka on aina yhdistettävä latausalustaan. Jos nurmikko sisältää kaksi (tai useampia) osaa, joiden välillä on Landroidille sopimatonta maastoa, ne on kuitenkin joka tapauksessa yhdistettävä samalla rajalangalla.
Jotta luodaan kaksi suljettua rajalankasilmukkaa, sinun on laitettava kaksi segmenttiä lähekkäin paikassa, joka jää kahden vyöhykkeen välille.
Muista, että kyseisessä tapauksessa sinun ei tule käyttää monivyöhykeominaisuutta, koska sinun on siirrettävä Landroid manuaalisesti yhdeltä vyöhykkeeltä toiselle. Muista myös, että kun akku tyhjenee, mikäli Landroid on ilman latausasemaa olevalla vyöhykkeellä, se ei voi siirtyä takaisin ja ladata akkua uudelleen.
Yksi mahdollinen ratkaisu tähän ongelmaan on ostaa toinen latausalusta ja asentaa se toiselle alueelle sen oman rajalangan kanssa. Sinun on kuitenkin edelleen nostettava Landroid yhdeltä vyöhykkeeltä toiselle.
Eri vyöhykkeiden asettamista varten, katso seuraavia artikkeleita käyttämäsi Landroid-mallin mukaan:
- Landroid S, M, L 2019/2020/2021 (nestekidenäyttö)
- Landroid M, L 2016-2018 ilman Wi-Fi-toimintoa
- Landroid S 2017/2018